![]()
![]()
![]()
![]()

![]()
![]()
![]()
![]()
![]()
![]()
|
|
|
|
LX200 Classic Advanced Hand ControllerAs noted in the LX200 Hand Controller, I decided to design and build an advanced version of the hand controller to replace my standard LX200 hand controller. As of March 10, 2008, I am happy to report that the project is moving ahead at an acceptable pace. Processor - at this time, I am using a Renesas H16C microcontroller and programming in C. This 48 pin surface mount cpu has just enough I/O to fit the bill. It also includes several UARTs, Timers, PWM and 64k of flash memory. I am using a development kit from Renesas (QSK26A) which sells for ~$55. It includes the complier, on-chip debugging, and the evaluation board. The actual H16C chip sells for ~$10. LCD Display - currently I am using a 128x64 graphics display. That gives me 8 lines of characters - although not very big characters. I may have to move to a larger display at some point - but for $27 this one is hard to beat. This display replaces the one on the QSK26A evaluation board. Keypad - Storm makes a large variety of keypads, and without going custom (big bucks) I am using a 4x4 LED illuminated keypad that allows the user to insert their own key legends. As with the LCD graphic display, the buttons are not as large as the current LX200 keypad, but I don't think that will be a problem except for when wearing HEAVY gloves. Most expensive part to date at ~$60 Joystick - found a good feeling unit for $18. March 10 - I now have the ability to display ASCII strings to the graphics display. Timer & PWM are operational (PWM to provide control over the backlights). Serial communication between the LX200 and AHC is functioning. I have several functions running - initialize scope, get mode, request RA and DEC. April 11 - I finished writing all the basic functions several weeks ago. At this point I am adding the "glue" that calls the functions. At this time I can call up any Star, CNGC or Messier object and have the telescope slew to the object. Normal messages of object below horizon or below user set horizon apply as well. The position and sidereal time are updated twice a second, even during slews. Below are some pictures of the work in progress:
Here is the start up screen showing the library version and current mode.
Here a Messier object has been selected. Along with the normal info, the RA and DEC of the object are also shown. Pressing the ENTER key will show you the distance to the object with the same block structure as the original hand controller.
After pressing GOTO, the distance blocks are shown, decrementing as the telescope slews to the desired object. As previously noted, RA, DEC and Sidereal Time are updated twice a second.
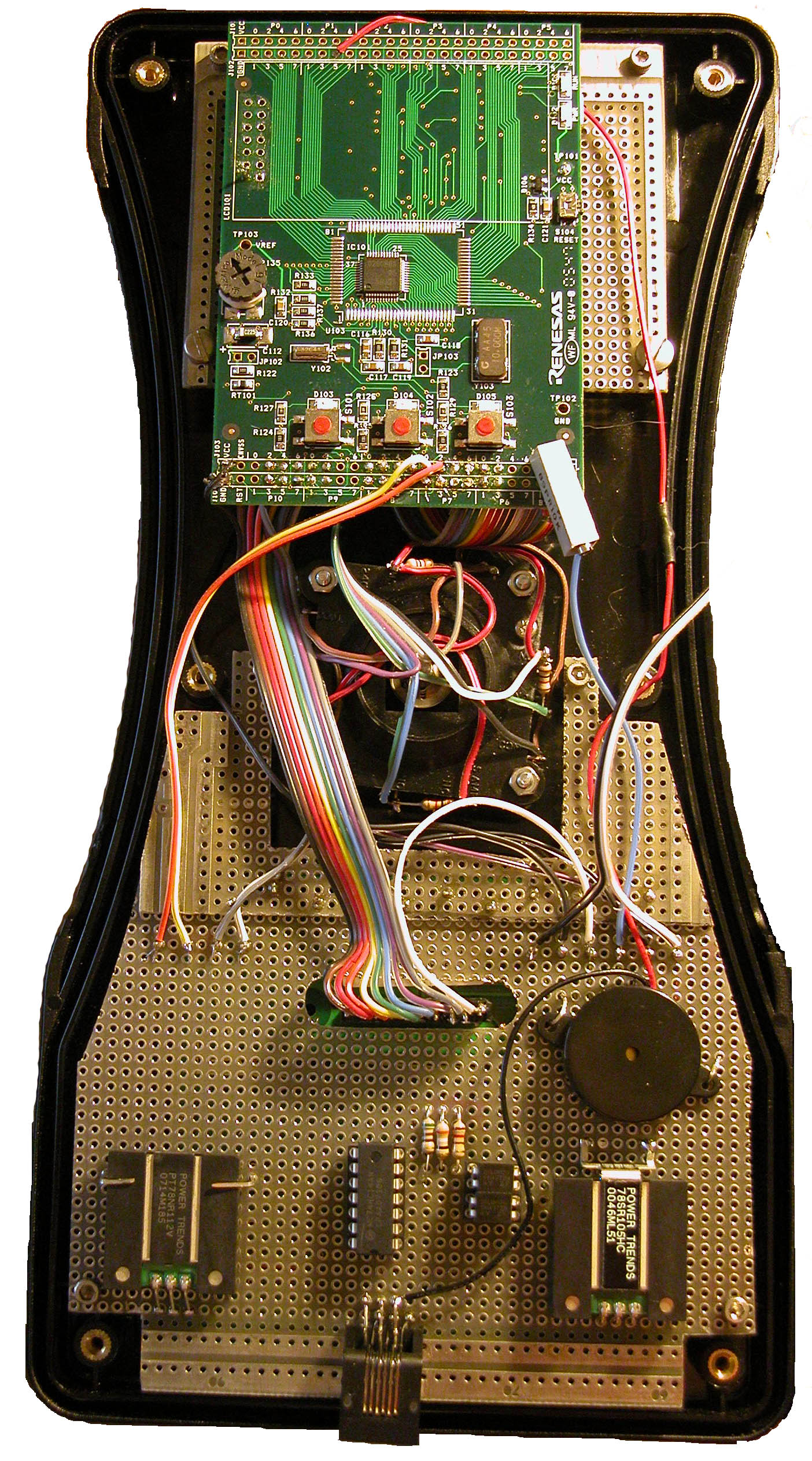
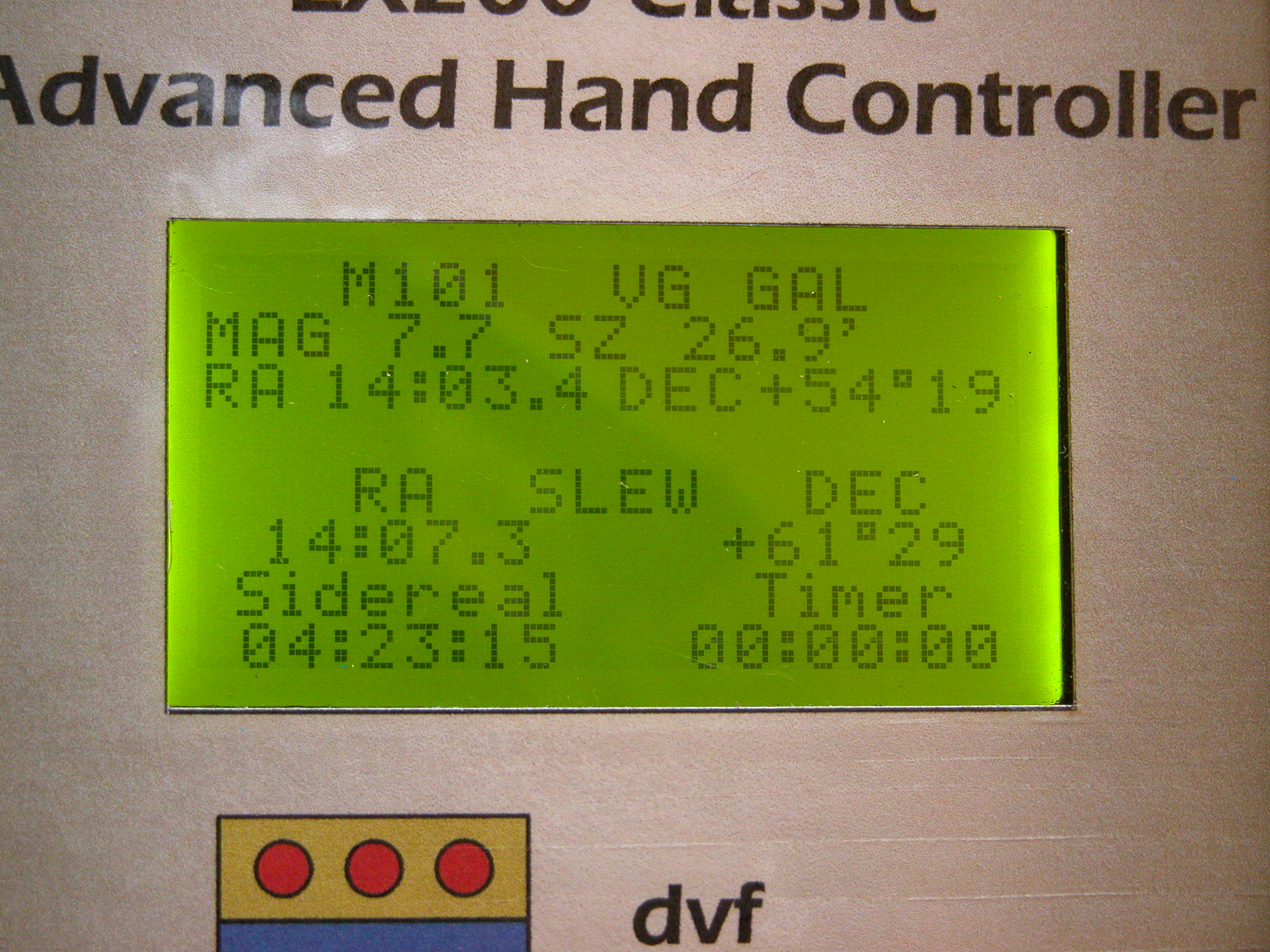
June 28, 2008 - School is finally out, we took our 10 day vacation on our sailboat Annabelle, and I am beginning to get some time to finish up the LX200 Advanced Hand Controller. 98% of all the software is written, the hardware has been installed in a case and the time for debugging has begun. Once the unit has been debugged and I can not find any problems I would like to send the two prototypes to people who have LX200 Classics for a review of operation - things they like, do not like and errors I may have missed. I would like to limit the trial time to a couple of weeks and then send the units to another reviewer. Once a dozen or so people have passed judgment on the units I can look to finalizing the design. Below are three images of the completed prototype - front, inside and a close up of the display showing information for M101 - notice that the scope is not pointing to M101.
UPDATE: - In late 2008 I discovered that there were two versions of the LX200 Classic software - pre-mid-1993 and after mid-1993. My LX200 is of the older variety and thus what I developed the hand controller for. Since then I have obtained a motherboard and motors for the newer version and I am currently decoding the communications between the Meade hand controller and the telescope so that I may reprogram the Advanced Hand Controller to work with the newer version of the LX200 Classic. This has turned out to be a very slow process. David May 20, 2009 |
|
Please address general comments to web@dv-fansler.com This page was last modified:
01/22/14 |